Hogyan működik egy cobot a bútorgyárban?
KIHÍVÁS
A termelési folyamatokhoz megfelelően képzett személyzet toborzása meglehetősen nagy nehézségnek bizonyult, ami arra késztette a vállalatot, hogy megvizsgálja az automatizálás lehetőségét. Olyan együttműködő automatizálási konfigurációt kerestek, amelyben az emberek és az újonnan integrált megoldások együtt dolgoznak az összeszerelési folyamat hatékonyságának növelése érdekében. A Becker emellett arra törekedett, hogy javítsa az alkalmazottak munkakörnyezetét, akikre ezáltal vonzóbb és kreatívabb feladatok vártak.
MEGOLDÁS
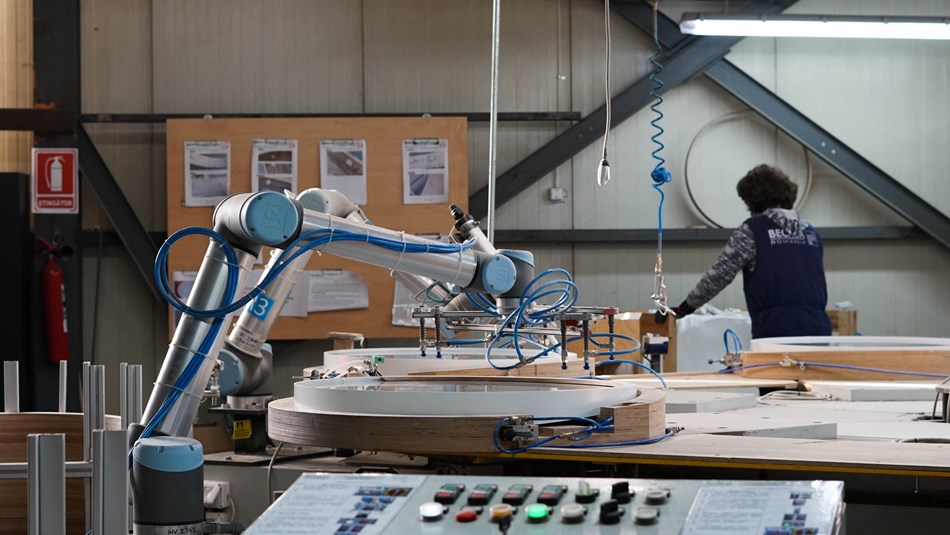
A Becker Románia azért választotta a Universal Robots együttműködő robotjait az automatizáláshoz, mert kifejezetten arra tervezték őket, hogy biztonságosan működjenek emberi munkaerő közvetlen közelében további biztonsági felszerelés nélkül, emellett rendkívül gyorsan és egyszerűen telepíthetők. A tükrök összeszerelésének folyamatába integrált két UR10 kobot párhuzamosan működik: az első UR10 ragasztót adagol a termék keretére, majd a második UR10 egy gyűrűs darabot helyez az üveg feletti ragasztós felületre. A kobotok programozása egyszerűen és gyorsan történt. A vállalat egy, a UR felületéről letölthető CircleMove nevű programot használt, ami viszonylag szabad mozgást tesz lehetővé. „A UR együttműködő robotokat könnyű programozni. Nem igényel magas szintű számítógépes és automatizálási ismereteket. Bárki, aki minimális műszaki ismeretekkel rendelkezik, sikeresen létre tud hozni alkalmazásokat ezekkel a robotokkal” - mondta Remus Țopan, a Becker Románia műszaki mérnöke.
A Universal Robots által nyújtott műszaki támogatás is nagyban hozzájárult a kobotok sikeres telepítéséhez. „A Universal Robots honlapján megtalálható az összes szükséges információ, még a kifejlesztett programokhoz, valamint a szoftverfrissítésekhez tartozó backup fájlok is, amelyek egyszerűen lementhetők a weboldalon található varázslófájlok segítségével. Egy egész közösség áll a háttérben, akik bármikor készek segíteni” - tette hozzá Remus Țopan.
A vállalat jelenleg a két együttműködő robot mellett dolgozó, emberi operátort használ egyik terméke összeállításához. Az operátorok hozzáadják a keretet, az üveget és kiürítik a forgóállványt a tükrök összeszerelése során. Az első kobot forrasztópisztollyal adagolja a ragasztót a kívánt helyre. Ha eljön a ragasztó cseréjének ideje, az egyik operátor az anyagfogyás nyomon követesére létrehozott speciális programon keresztül kap tájékoztatást. „A fogyasztási norma kiszámítása után létrehoztunk egy globális „telepítési változót”, amelyet a robot kikapcsolt állapotban is elment. Az egyes programok elején történő ellenőrzés során a változó megadja a csőben lévő ragasztó mennyiségét. Amikor eléri a 0 értéket, a program megnyit egy alprogramot, amely olyan helyzetbe mozdítja a robot karját, hogy az operátor könnyedén ki tudja cserélni a ragasztótartályt” - magyarázta Remus.
A második UR10 egy olyan könnyen és gyorsan összeszerelhető és beállítható, tapadókoronggal ellátott markolót használ, amellyel a félautomata adagolóegységből kiveszi a második részt és a ragasztó fölé helyezi. Minden automatizálási program és érzékelő bekerült a kobot vezérlőegységébe, megkönnyítve ezáltal a programozást. A keret észlelése távolságérzékelőkkel, a raktárban lévő gyűrűs szegmens detektálása pedig fotoelektromos érzékelőkkel történik. Az UR10 kobotokkal való összekapcsolódás egy PLC (Programmable Logic Controller, azaz programozható logikai vezérlő) segítségével történik, amely a forgóállvány működését is ellenőrzi, kétirányúan továbbított analóg jeleken keresztül.
ELŐNYÖK
A Becker Románia esetében az UR kobotok jelentősen javították a termékek összeszerelésének minőségét, lehetővé téve az alkalmazások ellenőrzését és a műveletek ismételhetőségét. További előnyt jelent a kobotok rugalmassága, lehetővé téve a más feladatokra való szükség szerinti átcsoportosítást, ami a Becker szempontjából versenyelőnyt jelent. A kobotok átcsoportosíthatóságából származó előnyt szem előtt tartva, a vállalatnak jelenleg van egy UR16 robotja is tesztelési fázisában, amely felülettisztítást végez.
„A UR együttműködő robotok felhasználóbarát programozása nem igényel magas szintű számítógépes és automatizálási ismereteket. Bárki, aki minimális műszaki ismeretekkel rendelkezik, sikeresen be tudja programozni az adott alkalmazási területre ezeket a robotokat. Egyetlen nap alatt gond nélkül elvégeztük a felszedési és beültetési (pick and place) alkalmazás tényleges programozását...”